




磁粉全自动码垛机可完成重物抓取,搬运,翻转,对接,微调角度等三维空间移载动作,为物料上下线和提供理想的搬运和组装工具。上下料码垛机械手在降低作业劳动强度提供物料安全搬运的同时,也可满足特殊间、人员无法进入的危险场所提供系统解决方案。配合各种非标夹具,机械手可以实现起吊各种形状的工件,重力的漂浮状态,操作者可以很轻易将负载起降,移动,旋转,前顷和侧翻等。并把负载快速,准确放置在预置,利用它一个人就能得心应手地操作原来几个人才能搬动的物品。
在采用磁粉全自动码垛机的时候,机器人抓手的选择很重要,真空抓手价格便宜,易于操作,而且能够有负载物。翻盖式抓手,它能将一个袋子或者其他包装形式的两边夹住;叉子式抓手,它插入包装的底部来将包袋子式抓手,这是翻盖式和叉子式抓手的混合体,它的叉子部分能包裹住包装的底部和两边。






码垛机械手改变了传统的物件传输方式,不再需要人工机械的重复高强度劳动作业,也不需要企业花费大量的人工费去搬运,或者是传送入生产作业线。应用于化工行业化肥肥料机械手码垛机的特点是:
1.结构简单,零部件少,因此故障率低、性能稳定、操作保养维修简单,维护费用低。
2.可以24小时连续工作,减少劳动强度,有效提高生产效率。
3.降低产品的损坏率,缩短生产周期,缓解生产压力
4.高产高l效,根据要求进行配置,在同等时间内完成更大量的码放。
5.可码五花、六顺、八花、十花等垛型;垛型紧凑,不易坍塌。可储存多组码垛配方,可直接调用,方便快捷。
6.托盘尺寸适用范围广,满足各种型号尺寸的托盘。
7.可根据现场及客户需求定制。

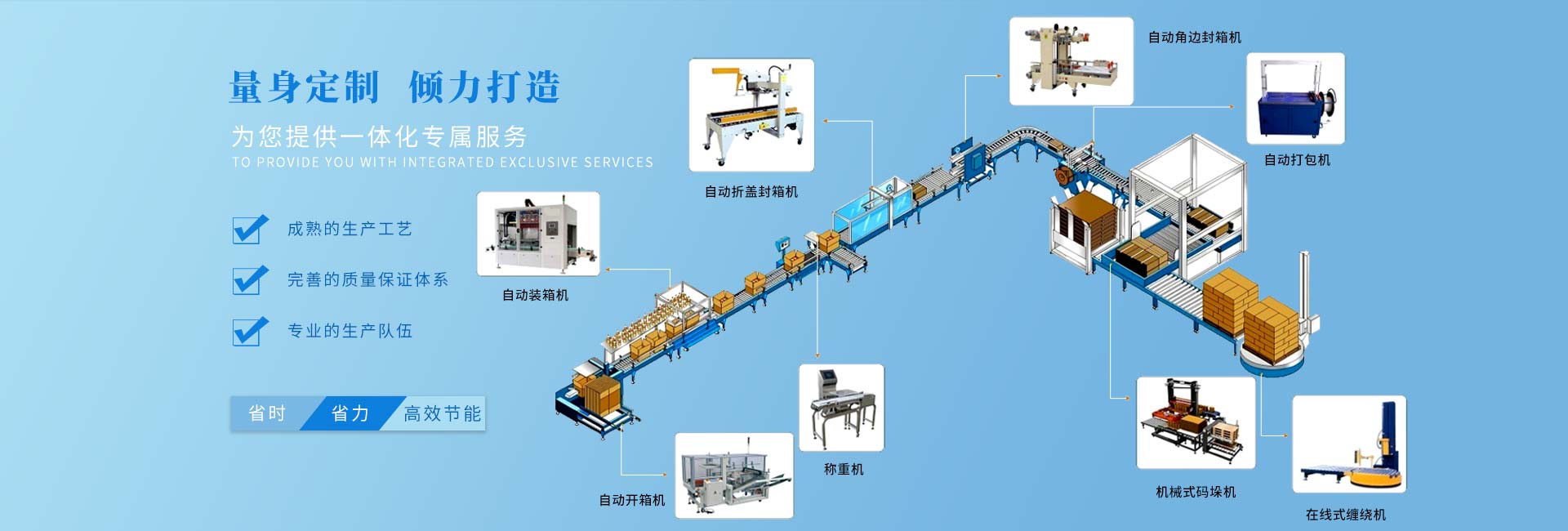
传统高位码垛机,自动码垛机主要应用于袋装行业,比如饲料、面粉、化肥等,其中饲料是由各种质料、养分必需品混合加工而成的,饲料的出产原材料输送到车间之后,通过复杂繁琐的质料把跺拆包后,通过输送设备将物料送到反响釜拌合设备,对质料混合拌和,然后再经过烘干等程序,蕞终将制品饲料,进行装袋、封包处理。
而蕞后的一步,就涉及到码垛的工作了,装袋后的成品饲料,以前都是靠蕞传统的方式对饲料人工搬运,然后送到指l定地点,码成垛。传统的操作方法,不仅仅效率低,而且在码垛的过程中,会因为人工码垛缺点的制约,导致码的跺形状不规则,一旦码的跺高了,就会有倒塌的风险。
正因为人工码垛的众多缺点,自动化码垛机应运而生,码垛机的结构组成较为复杂,但客户应用起来却是简单、维护方便等众多优点,饲料码垛机主要由运送机压平、缓停运送机、转位运送机、托盘仓、托盘运送机、编组机、推袋设备、码垛设备、垛盘运送机等配件组成。设备结构设计合理先进,动作平稳牢靠。码垛进程智能化,正常作业时不需要人工操作,市场应用以来,极大地提高了企业生产效率,降低了人员成本,具有广泛的适用范围。




 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


